大话数据结构10-图2
上节中,我们介绍了图的基本概念以及他的基本操作:存储、遍历方法。这一节,我们更加深入的探讨一些图的相关的实际应用,包括:最小生成树,最短路径 和 有向无环图 的拓扑排序和关键路径问题。每一个应用下,都介绍了几种算法,在这一过程中,我们可以更加深入的了解图的结构及它的相关操作。
I 最小生成树
我们把构造连通网的最小代价生成树称为最小生成树(Minimum cost spanning tree)。寻找连通网的最小生成树,经典的有两种算法,普里姆(Prim)算法和克鲁斯卡尔(Kruskal)算法。
a. Prim 算法
假设 $N = (P,\{E\})$ 是连通网,$TE$ 是 $N$ 上最小生成树中边的集合。算法从 $U=\{u_0\}(u_0\in V)$, $TE=\{\}$ 开始,重复执行下述操作:在所有 $u\in U, v\in (V-U)$ 的边 $(u,v)\in E$ 中找到一条代价最小的边 $(u_0,v_0)$ 并入集合 $TE$, 同时$v_0$ 并入 $U$, 直到 $U=V$ 为止。此时,$TE$ 中必有 $n-1$ 条边,则 $T=(V,\{TE\})$ 为 $N$ 的最小生成树。
通俗一点讲,就是将上述 $U$ 看做一个广义的”点”,然后寻找到这个点距离最短的一个具体顶点,并入 $U$, 再重复以上运算的过程。
对于n个顶点的图,Prim 算法的时间复杂度为 $O(n^2)$.(具体参见代码)
b. Kruskal 算法
不同于 Prim 算法找点的方式,Kruskal 算法基于的是直接去找edge。在上一篇图的存储章节中我们介绍了边集数组的存储方法,Kruskal 算法就基于这个数组实现,所做的首先是将该数组按照权值排序。
具体的,假设 $N=(V,\{E\})$ 是连通网,则令最小生成树的初始状态为只有 $n$ 个顶点而无边的非连通图 $T=(V,\{\})$, 图中每个顶点自成一个连通分量。在 $E$ 中选择代价最小的边,若该边依附的顶点落在 $T$ 中不同的连通分量上,则将此边加入到 $T$ 中,否则舍去此边而选择下一条代价最小的边。依次类推,直至 $T$ 中所有顶点都在同一连通分量上为止。
对于有 $e$ 条边的图,Kruskal 算法的时间复杂度为 $O(elog(e))$。
II 最短路径
对于网图来说,最短路径是指两顶点之间经过的边上权值之和最少的路径,并且我们称路径上的第一个顶点是 源点,最后一个顶点是 终点。为求最短路径,我们在这里介绍两种算法。
a. Dijkstra(迪杰斯特拉)算法
Dijkstra 算法不是直接一步到位去求两点间的最短路径,而是选取两点中的一点为起点,一步一步求得与它最接近的点的最短距离,与之稍远的点之间的最短距离,与之相距更远的点之间的最短距离,直到达到最终结果。
实际上,Dijkstra 算法求得了源点到其余各定点之间的最短路径,并且算法的时间复杂度为 $O(n^2)$。
此外,如果我们需要直到所有点到所有点的最短路径,我们可以使用 Dijkstra 算法对 n 个点再进行一次循环,从而时间复杂度变为 $O(n^3)$。
b. Floyd 算法
类似的, Floyd 算法同样可以在 $O(n^3)$ 的时间复杂度下求得所有点到所有点的最短距离,并且实现更加优雅。
具体代码如下:
1 | typedef int Pathmatrix [MAXVEX][MAXVEX]; |
III 拓扑排序-针对AOV网
在一个表示工程的 有向图 中,用顶点表示活动,弧表示活动之间的优先关系,这样的有向图为顶点表示活动的网,我们称为 AOV 网。(activity on vertex network)。与树结构不同的是,可能有多个弧指向同一个顶点,而树的每一个结点只能有一个父节点。
设 $G = (V,E)$ 是一个具有 n 个顶点的 有向图,$V$ 中的顶点序列 $v_1,v_2, … v_n$,若满足从顶点 $v_i$ 到 $v_j$ 有一条路径,则在顶点序列中 $v_i$ 必定在 $v_j$ 之前。则我们称这样的顶点序列为一个 拓扑序列。
对一个有向图构造拓扑序列的过程称为 拓扑排序。如果得到的拓扑序列输出了此网的全部顶点,则说明它是不存在环(回路)的 AOV 网;如果输出顶点数少于总顶点数,则说明这个网存在环(回路),不是 AOV 网。
针对 AOV 网进行拓扑排序的基本思路如下:从 AOV 网中选择一个入度为 0 的顶点输出,然后删去此顶点,并删除此顶点为尾的弧,并继续重复此步骤,直到输出全部顶点或者 AOV 网中不存在入度为 0 的顶点为止。根据上述描述,拓扑排序的过程涉及顶点的删除,显然使用邻接表会更加方便。
IV 关键路径-针对AOE网
在一个表示工程的 带权有向图 中,用顶点表示事件,有向边表示活动,用边上的权值表示活动的持续时间,这种有向图的边表示活动的网,我们称之为 AOE 网(Activity On Edge Network)。我们将 AOE 网 中没有入边的顶点称为 始点 或 源点,没有出边的顶点称为 终点 或 汇点。
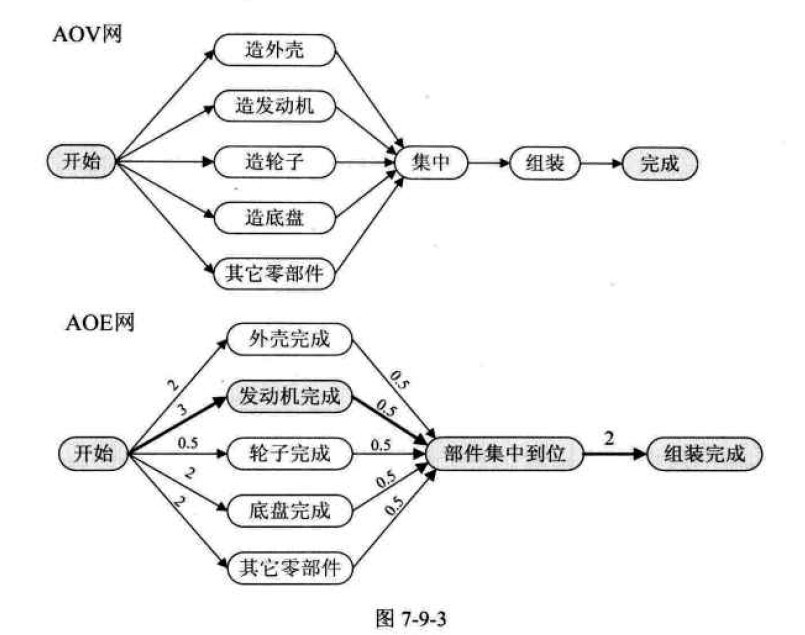
一个简单的 AOV 和 AOE 的例子如下。可见, 虽然两者都是对于工程的建模,但是 AOV 网只描述活动之间的制约关系,而 AOE 网则在 先后顺序信息 的基础上,增加了权值信息。
对于 AOE 网来说,满足如下两点:
- 只有某顶点的事件发生后,从该顶点出发的各项活动才能开始;
- 只有进入某顶点的各项活动都已经结束,该顶点的事件才能发生。
我们把路径上各个活动所持续的时间之和称为 路径长度,从源点到汇点具有最大长度的路径叫做 关键路径,在关键路径上的活动叫做 关键活动。时间上,关键路径是完成整个工程所需要的最短的时间,之所以称之 关键,是因为若想要提升整个工程的效率,必须从关键路径的关键活动入手,减少时间,从而缩短整个工期。
寻找关键路径的算法的核心是寻找到一个个的关键活动,为寻找关键活动,我们首先做如下的几个定义:
- 事件 的最早发生时间 etv (earliest time of vertex):即顶点 $v_k$ 的最早发生时间;
- 事件 的最晚发生时间 ltv (latest time of vertex): 即顶点 $v_k$ 的最晚发生时间,也就是每个顶点对应事件最晚需要开始的时间,超过该时间将会延误整个工期;
- 活动 的最早开工时间 ete (earliest time of edge): 即弧 $a_k$ 的最早发生时间;
- 活动 的最晚开工时间 lte (latest time of edge):即弧 $a_k$ 的最晚发生时间,也就是不推迟工期的最晚开工时间。
寻找 关键活动时,我们首先由 1,2 中的“事件”时间 求得 3,4 中的“活动”时间,然后再根据 ete[k] 是否与 lte[k] 相等来判断 $a_k$ 是否是关键活动。
类似于处理 AOV网 的拓扑排序问题,我们也使用邻接表结构存储图,来处理 AOE 的关键路径问题,具体代码此处略。
V 图总结
图的存储结构中,比较基础和重要的是 邻接矩阵 和 邻接表,他们分别是将 边集 存储在数组中 和 链表中。十字链表 是 对邻接表的一种升级,而 邻接多重表 和 边集数组 则更多的考虑的是对边的关注。存储结构的选择与所处理的数据特征及需要进行的操作有关,例如对于稠密图,或者读存数据较多,结构修改较少的图,使用 邻接矩阵 更加合适,反之,则更加推荐 邻接表存储。
此外,我们还介绍了图的三种应用:最小生成树,最短路径和有向无环图(AOE,AOV)的应用。
最小生成树的两种算法,prim 算法是走一步看一步的思维方式,逐步生成最小生成树。而 Kruskal 算法则更有全局意识,直接从权值最小的边入手,寻找答案。
最短路径的实现方法很多,Dijkstra 算法从单个顶点开始逐步查找最短路径,符合我们的正常思维。而 Floyd 算法则抛开了单点局限思维,应用矩阵的变换,用简洁的代码实现了最短路径的求解,但原理理解相对较难。